
Space stations and artificial satellites have been widely used in communications, navigation, meteorology, astronomical observation, military, etc. However, at the mercy of complex and changeable space environment, spacecrafts may be disabled due to functional module degradation, failure, and running out of fuel. These spacecrafts need to be repaired or restored to avoid becoming space debris. Thus, the on-orbit service technology is developed, which covers a wide range of fields such as on-orbit maintenance, on-orbit assembly, on-orbit detection, and space debris removal. On the other hand, the current space on-orbit operation tasks are tending to be lightweight, miniaturized, multimodule, and multifunctional, where the CubeSat, a small, low-cost satellite, was born and played an important role. In a research paper recently published in Space: Science & Technology, Jinguo Liu, Shenyang Institute of Automation, Chinese Academy of Sciences, combining the CubeSat technology, innovatively proposed a deployable 1 U-sized space robot, named Cubot, for the on-orbit tasks of space debris removal and space station auxiliary maintenance.
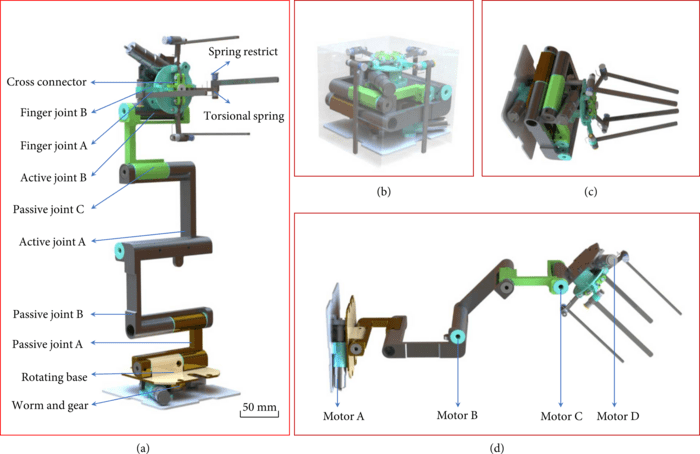
First of all, the system design of Cubot were introduced from three aspects. Firstly, the authors innovatively proposed a modular structure design method for the space manipulator, with the purpose of facilitating the configuration and application of the manipulator in CubeSat. Cubot is composed of three parts, including active joints, passive joints, and end effectors. The design parameters including rod length, passive joint number, and the size of end-effector can be adjusted flexibly and customized according to specific on-orbit missions. The link length and link offset can be confirmed according to required storage size. Thus, Cubot can be designed flexibly serving for suitable CubeSat space. Secondly, two working modes of Cubot for on-orbit service were introduced. Mode A was designed for space station on-orbit maintenance. Cubot can replace astronauts in space operations to reduce the risk of on-orbit missions. Mode B was designed for active removal of space debris. Relying on the CubeSat system, Cubot can complete the debris capturing in the range of low to high orbit. Although Cubot cannot capture the debris that is high spinning because the despinning device is not designed, Cubot is operable for the debris that is no spinning or low spinning that can keep relative status by the friction with gripper. In this way, Cubot can perform capture missions for many times, which reduces the launch cost greatly. Thirdly, the mechanism analysis was carried out for the two different configurations (deployment process and after deployment) of Cubot. During the deployment process, the passive joint can be regarded as an active joint with angular limitation, and the limiting angle was determined by the preset angle of the torsion spring. Therefore, the Cubot in the deployment process can be regarded as a 7-DOF manipulator. After completing the deployment process, two links connected to the passive joint were merged into one, all the passive joints disappear, and only active joints remained. In this configuration, Cubot became a 3-DOF manipulator with only active joints.
Afterwards, the author described a kinematic modeling method for a free-flying space robot with passive joints, and the dynamic simulation of Cubot was implemented. Firstly, the author derived a general kinematics model for the free-flying space robot with passive joints, which was a time-varying system. The movement state of the deployment process was closely related to the physical properties of the passive joint and the applied preset angle. Next, Considered the elastic potential energy stored in the passive joint during deployment, the momentum change of Cubot was simulated and analyzed. The result showed that the system had a greater impulse at the beginning of the deployment process, and the active joint B had the largest impulse. Physical interference between the robotic arm and other objects should be avoided as much as possible during the deployment of Cubot, including CubeSat’s structural parts and surrounding space debris. Furthermore, As the main forced element, the end effector was analyzed using Finite Element Analysis (FEA). Dynamic stress response with respect to the force distribution and the clamping angle was analyzed to evaluate mechanical performances of the end-effector component. The results showed that the maximum value of the end effector would alternate between long rods and short rods. When Cubot grasps targets with different sizes, the failure location and the maximum allowable clamping force can be determined by the maximum stress response surface.
Finally, the principled prototype was processing, and ground tests were carried out. In the manufacture of the preliminary prototype, motors, springs, and worm gears were defined according to actual working conditions of Cubot. tests showed that Cubot with the end effector can be completely stowed in a 1U space, which realized the design idea of miniature and modular. Next, the author performed a total of 10 sets of deployment tests. All passive joints and the end-effector could be deployed smoothly, which verified the deployment feasibility and reliability of Cubot. In addition, the author tested Cubot capturing different irregular objects in different postures, and the end effector can achieve all the tests effectively. In the future, the author would make Cubot and the solar sail as the two modules of the CubeSat to study the coupling dynamics. Moreover, the control problems of space debris capture coupled with Cubot and CubeSat would be focused on, including desorption and deorbit.
Reference:
Author: Jinguo Liu, Pengyuan Zhao, Keli Chen, Xin Zhang and Xiang Zhang
Title of Original Paper: 1U-Sized Deployable Space Manipulator for Future On-Orbit Servicing, Assembly, and Manufacturing
Article Link: https://doi.org/10.34133/2022/9894604
Journal: Space: Science & Technology
DOI: 10.34133/2022/9894604
Affiliations:
State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China
Institutes for Robotics and Intelligent Manufacturing, Chinese Academy of Sciences, Shenyang 110169, China
University of Chinese Academy of Sciences, Beijing 100049, China
National Innovation Institute of Defense Technology, Academy of Military Sciences, Beijing, China
Journal
Space: Science & Technology
DOI
10.34133/2022/9894604
Article Title
1U-Sized Deployable Space Manipulator for Future On-Orbit Servicing, Assembly, and Manufacturing
Article Publication Date
7-Sep-2022